Overview
在给定的loss function情况下,采用一种算法帮我们找到该loss function的最小值或者接近最小值。
即:minimize loss(X,y,\(\Theta\))。
机器学习的问题最终都会归结为对一个优化问题进行求解,而优化问题可以分为无约束优化问题和有约束优化问题。有约束的优化问题是指对于目标函数中的变量有显式约束条件的,比如0<=x<=100。
无约束优化问题是指对于目标函数的变量没有显式约束的,或者说可以将约束转化成目标函数的惩罚项的,比如说正则化项。
大多数机器学习问题最终都要解一个无约束的优化问题,因此本文主要对无约束优化问题及其优化算法做一个概述。下文提到的优化问题都指无约束优化问题。
Optimization
在函数满足一些限制的情况下,找到一个工具或者办法使得该函数最小。
s.t.
eg.
- linear regression:
- classification(logistic regression or SVM)
gradient Method(梯度法)
两个关键点:搜索方向和归一化(feature scaling?)
搜索方向
在直线搜索的方式中,算法首先选择一个搜索方向(不同的算法选择的搜索方向不同)\(p_k\),然后沿着这个方向从\(x_k\)开始去搜索\(x_{k + 1}\),使得目标函数在(x_{k+1}\)处的值要更优于在\(x_k\)处的值。现在的问题是要沿着\(p_k\)走多长,才能找到最优的\(x_{k+1}\),所以在直线搜索中,一旦搜索方向确定了之后,搜索的是这个步长t的值。这可以通过下面的公式获得:
通过求解上式,我们可以得到最优的\(\mu\)值,但是在实践中,这样做的代价是十分大的,也没有必要,因此实践中只需要找到一个最小值的近似就可以了,也就是说\(f(x_{k+1})\)的值相对于\(f(x_k)\的值有足够的减小即可。在得到\(x_{k+1}\后,算法会重新计算新的迭代方向和步长。如此往复,直到最终问题求解。
对于直线搜索,我们已经提到了不同的算法会选择不同的搜索方向。这里我们介绍两个方向,一个是最速下降方向(steepest descent direction),另一个是牛顿方向(newtown direction)。前者对应的是目标函数的一阶导数,而后者对应的是目标函数的二阶导数。
归一化(feature scaling?)
有时候优化算法的性能取决于问题的形式。这其中一个重要的方面就是模型参数(目标函数系数)的归一化。当目标函数的某一个变量发生变化时,它使得目标函数的值发生很大的变化,而在另外的变量上做相同的改变时,目标函数值的变化远远不及上述变化,那么这个问题被认为是没有归一化的。
在机器学习 - feature scaling中会进行详细的讲解。
Gradient Descent(梯度下降法)
Gradient Descent几乎是全世界目前为止最简单有效的优化算法。
算法如下:
Repeat to minimize \(f_{\Theta}(X, Y, \Theta)\) :
其中 \(\Theta = \begin{pmatrix} \theta_0, \theta_1, \theta_2, \cdots, \theta_n \end{pmatrix} \), \(\mu\)为learning rate.
该算法所选择的搜索方向为最速下降方向,其中\(p_k = \frac{\partial f_{\Theta}(X, Y, \Theta)}{\partial \theta_k}\)。
principle(原则)
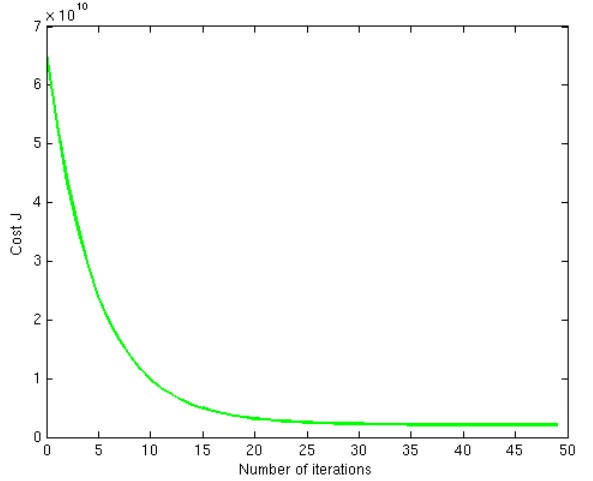
- learning rate的选择
选择一个足够小的值,确保loss function的值不会发散,最后收敛于一个稳定额值。如下图所示:
batch gradient Descent(full gradient descent)
计算损失函数在整个训练集上的梯度方向,沿着该方向搜寻下一个迭代点。”batch“的含义是训练集中所有样本参与每一轮迭代。
损失函数如下:
训练算法如下:
repeat \(minimize Loss\):{
}
mini-batch gradient descent
假设训练集有m个样本,每个mini-batch(训练集的一个子集)有b个样本,那么,整个训练集可以分成m/b个mini-batch。我们用ω表示一个mini-batch, 用Ωj表示第j轮迭代中所有mini-batch集合,有:
算法如下:
repeat {
repeat {
} for (k = 1,2,…,m/b)
}
stochastic gradient descent
随机梯度下降算法(SGD)是mini-batch GD的一个特殊应用。SGD等价于b=1的mini-batch GD。即,每个mini-batch中只有一个训练样本。
应用:主要用于online learning
Newton(牛顿法)
如上图所示,牛顿算法使用数学的方式,一步达到最优的参数值。
缺点:在进行海量数据计算时,计算H(hessian)的逆需要大量的空间和时间,成本太高。
BFGS(变尺度法)
属于quasi-Newton方法中的一种
L-BFGS
在生产环境中,使用最多的一种。
conjugate gradient
references(参考)
- 机器学习的优化算法概述
- Optimal Weight and Learning Rates for Linear Networks
- book:”Introduction to Convex Optimization for Machine Learning” by John Duchi
- Approximations Of Roots Of Functions – Newton’s Method
- batch-GD, SGD, Mini-batch-GD, Stochastic GD, Online-GD – 大数据背景下的梯度训练算法